CerevoのIoTモジュール「BlueNinja」はサイズが非常に小さいため、ガジェットへの組み込みも容易です。その使用例として今回はタミヤ製のミニ四駆を組み合わせた、「ミニ四駆テレメトリーシステム(ロガー)」をご紹介します。
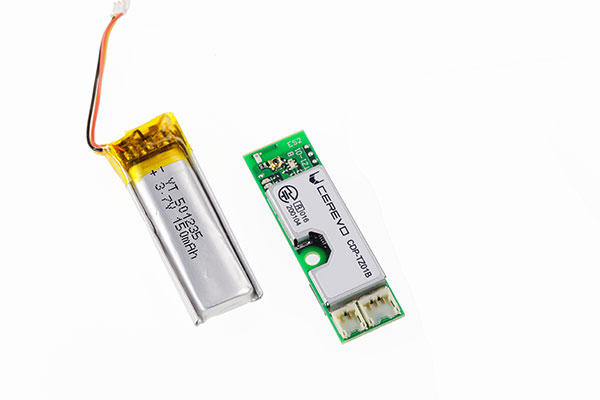
BlueNinjaのコアとなる東芝の「TZ1001MBG」はBluetooth® Low Energyのコントローラ機能、入力データを処理するCortex-M4Fプロセッサ、およびデータを保存するフラッシュメモリを1パッケージに内蔵したSoCです。さらに本モジュールには加速度センサ、気圧センサ、リチウムイオン電池の充電・放電回路を搭載。通信部は技適を取得済みです。
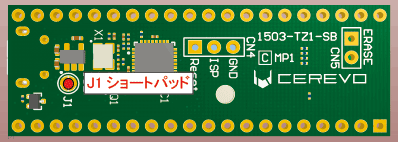
ブレイクアウトボードを取り付けることで、microUSBからの5V給電、mbed互換のファイルの書き込み、最大16本のGPIOの引き出しに対応しています。
最大の特徴は本モジュール単体で11×37.5mmという超小型サイズ。
これまでのラピットプロトタイピングツールは試作向けが多く、サイズや技適などの規格取得の問題でそのまま実際の製品に組み込むことは難しく、再設計や規格取得対応などで量産には長い時間がかかりました。 しかし、BlueNinjaはそのまま量産製品に組み込めるので、量産IoT製品ををスピーディーに市場に投入可能となります。
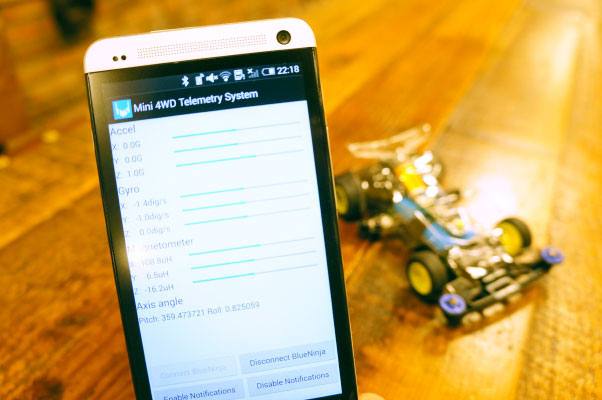
本モジュールをミニ四駆のボディに内蔵して走らせ、以下のパラメタをBLE経由でスマートフォンにリアルタイムで表示します。
| 加速度3軸(x, y, z) | 角速度3軸(x, y, z) |
| 地磁気3軸(x, y, z) | 気圧センサー |
小型リチウムポリマー電池もはめ込むだけの簡単接続できるため、本当に貼り付けるだけの実装です。
お手元のBlueNinjaとAndroidスマートフォンで実際にお試しできるように、プログラムのソースコードを公開します。
| BlueNinjaのプログラム | ソースコード[GitHub] |
|---|---|
| Androidのプログラム | ソースコード[GitHub]/実行ファイル(apk) |
※ブレイクアウトボードからのUSBバスパワーで動かす場合はブレイクアウトボードのJ1をショートする必要があります。
開発環境
- ブレイクアウトボードにmbed相当のインターフェースを搭載
- エクスプローラ/Finder等でbinファイルのドラッグアンドドロップでプログラム書込可能
- 統合開発環境やGDB+OpenOCDでデバッグ可能
対応開発環境・コンパイラ
- Gnu Tools (GCC, GDB, binutils)
- Keil MDK-ARM(ARM Compiler)
※Gnu Toolsのセットアップ支援ツール、セットアップ手順はCerevoから提供の予定 - ブレイクアウトボードにmbed相当のインターフェースを搭載
※mbed互換製品ではありません


Cerevo ミニ四駆テレメトリーシステムチームメンバー
-

矢野 元章 回路・基板設計担当
BlueNinjaの回路・基板設計を担当、製造。チップマウンタを使った動画の人。ニキシー管を使った次の実例品を作成中。
-

奥原 史至 ソフトウェア担当
ソフトウェアエンジニアでもBlueNinjaでハード製品が作れるか挑戦中。ミニ四駆テレメトリシステムのアプリを開発。
-

長谷川 隆太 メカデザイン担当
デザインエンジニアとしてBlueNinjaのロゴを制作。前職でのエンジン設計の経験を活かしてミニ四駆の組み立てを担当。
-

押切 眞人 記事執筆担当
回路設計者。同人誌の次はBluneNinjaの擬人化も目論む。本プロジェクトでは記事執筆を担当。